早大ものづくりプログラムで大賞受賞! “みまもる”ロボットをゼロから設計
「自走する作り手でありたい」「ものプロへの参加は大きな成功体験」
創造理工学部 4年 玉山 康次郎(たまやま・こうじろう)
創造理工学部 4年 片桐 萌音(かたぎり・もね)
![]()
西早稲田キャンパス61号館WASEDAものづくり工房にて。左から片桐さん、玉山さん
新しいことに挑戦し失敗からも学ぶ意欲、計画を立て着実に遂行する能力、困難に立ち向かう力を有する学生の育成を目的として、2012年から2018年まで毎年開催されていた「WASEDAものづくりプログラム 」(以下、ものプロ)。2024年6月に6年ぶりに復活し、ファイナリストに13チームが選ばれ、アイデアをカタチにするための独創的な「ものづくり」に挑みました。その中から最優秀ものづくり大賞に選ばれたのは、玉山康次郎さん、片桐萌音さん、林浩次郎さん(創造理工学部 4年)が製作した、ヒトを“みまもる”フクロウ型アニマトロニクス(※1)「Patr-Owl(パトロール)」。今回は、チームを代表して玉山さんと片桐さんに、大賞受賞までの過程や今後の展望について聞きました。
(※1)動物やキャラクターなどをあたかも生きているかのように表現したロボット。
――どのような経緯でものプロに出場したのでしょうか?
玉山:私たちは大学1年生の頃から早稲田大学ROBOSTEP (公認サークル)に所属し、ロボコンに参加するなど、ものづくりに取り組んできました。3年生になり、他に「作り手」として成長できる機会を探していた時に、ものづくり工房に貼ってあったチラシを見つけ、参加を決めたんです。その際に、片桐さんに声を掛けました。
――Patr-Owlを作ろうと思ったきっかけは何ですか?
玉山:私は以前から遊園地でよく目にするアニマトロニクスの和やかな感じが大好きでした。やる気が出ず、だらだらしてしまっていたときに、自分の家に和やかに見守ってくれるようなロボットがいたらやる気が出るのになあ、と思ったのがきっかけです。
片桐:誰かに見守られることでやる気が出るという現象には、観察者効果(※2)が関わっています。普段は娯楽・展示用に使われるアニマトロニクスと観察者効果を結び付けることができれば、「監視」ではなく恐怖感を与えない「みまもり」になるのではないかと考えたんです。みまもりということで、目が特徴的な動物であるフクロウ型のロボットPatr-Owlを作ることに決めました。
(※2)他者から監視されていると感じることで、その人の行動や言動が変化する現象。
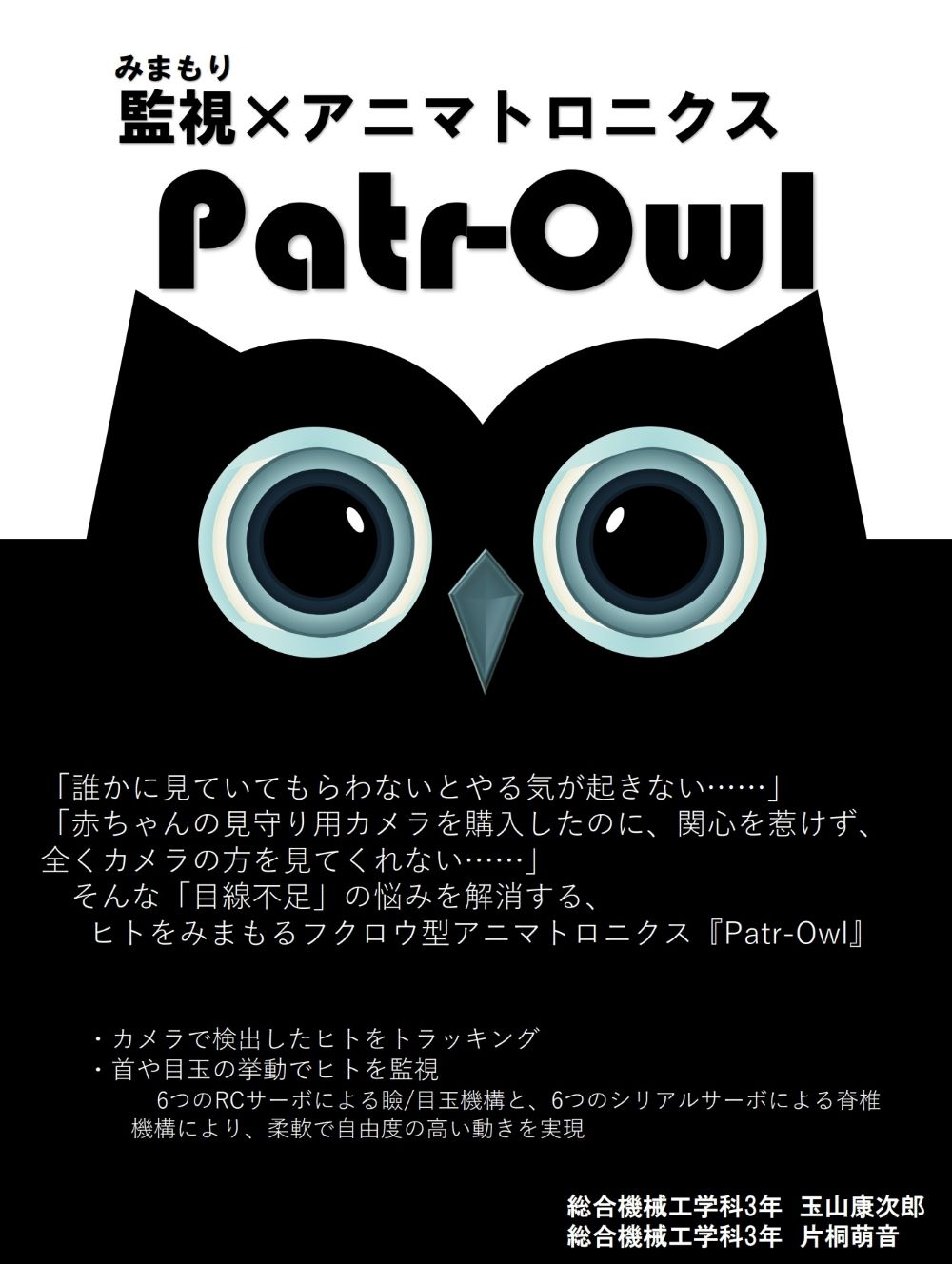
ものプロ最終成果報告で発表したポスター(※クリックして拡大)
――Patr-Owlの仕組みや制作過程を教えてください。
片桐:Patr-Owlの帽子に内蔵されているカメラが人の顔を認識して、その方向に目や体を向けて「みまもる」という仕組みになっています。フクロウは首の関節が多く、その滑らかな動きをできるだけ再現するために、6関節あるアームの構造を考えました。
Patr-Owlが人のいる方向に体を向ける様子
人の顔がある方向に目を向ける様子
玉山:製作にあたっては、片桐さんが中身の機構を作る機械設計と外装やデザイン回り、私はPatr-Owlの動きを制御するプログラムや基板の設計を担当しました。本番までの準備時間が足りなかったため、3月頃からは同じサークルに所属する林さんにも急きょ助っ人として参加してもらい、主にカメラで人の顔を画像認識する部分を担当してもらいました。
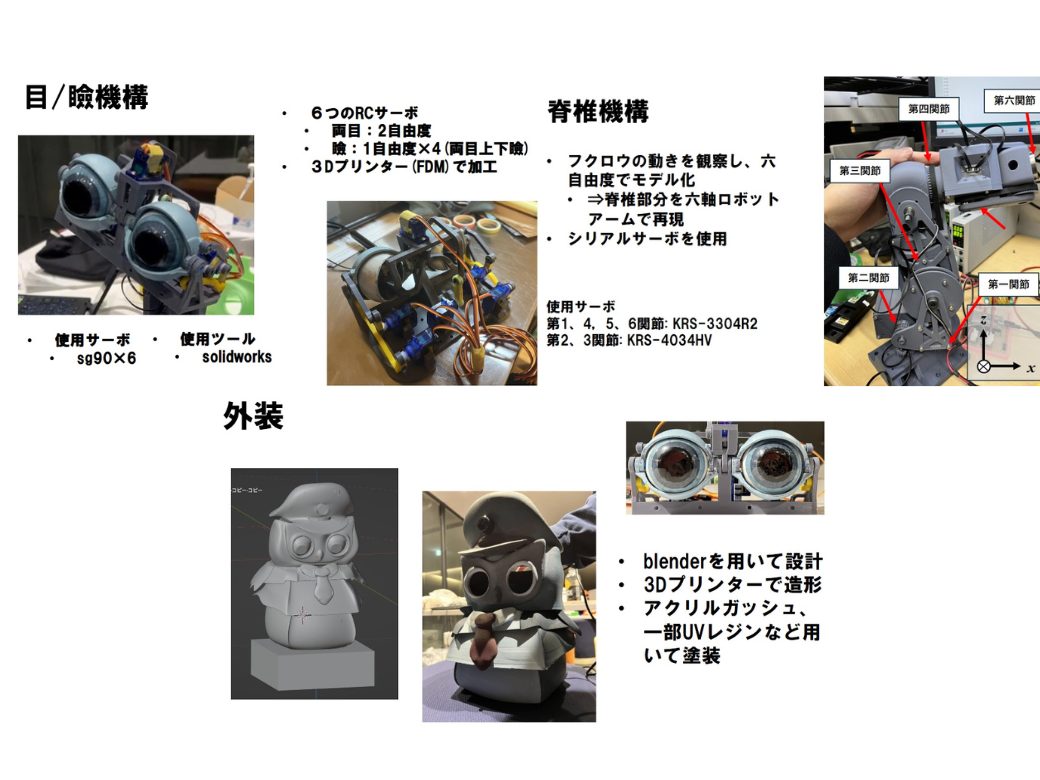
全てゼロから製作した回路、基板、中身のアーム機構、外装。プレゼン資料から(※クリックして拡大)
――ものプロを通して、苦労したことや成長できたことはありますか?
![]()
片桐さんが外装を作っている様子。西早稲田キャンパス63号館にて
玉山:2024年9月から2025年3月までの期間で、機械設計から回路設計、制御、外装製作まで全てゼロから行うという作業量に加え、初めて挑戦する技術も多かったため、もともと2人でやりきるにはハードルが高かったと思います。加えて、2024年はお互いのスケジュールがなかなか合わないことも多く、授業期間が終わった1月末からは追い込み期間として毎日西早稲田キャンパス内のラウンジや研究室にこもって作業し、基板へのはんだ付けはWASEDAものづくり工房で行いました。
片桐:帰宅後も外装を作っていたので、最終発表の2日前くらいからは全く寝ていませんでした。Patr-Owlが満足に動いたのも発表の前日で…。本当に間に合って良かったですし、やり切った結果が大賞受賞だったので、かなりうれしかったです!
ロボット制作をギリギリまでこだわった上でやりきり、大賞をいただくという体験ができたのは、自分の成長につながったと感じています。これまで出場したロボコンではやりきれなかったと思うことや結果に悔しい思いをしたこともあったので、今回のものプロへの参加は大きな成功体験になりました。
玉山:私は突き詰めるタイプで、何事も「根本を理解する」ことにこだわりがあります。この考えは、早く作れることの方が評価されがちなロボット競技において、「いらないこだわり」と周りから言われてしまうこともあり、ロボット製作への向き合い方について迷うこともありました。そんな中、短い期間で自分の方法をやり通し、チームとして納得のいくロボットで大賞をもらうことができ、とても満足しています。
![]()
取材中の様子。西早稲田キャンパス61号館302教室にて
――大学ではどのようなことを学んでいますか?
玉山:所属している石井裕之教授の研究室ではロボットと生物について学んでいて、生物の仕組みをロボットに応用する研究を行っています。私は総合機械工学科に所属していますが、実際にモノを製作する授業が多い学科です。他の大学だと、1・2年生では大学数学や物理化学など理系の一般教養のみを学ぶことが大半だと思いますが、早稲田では1年生から機械工学の講義や多くの実習に取り組める専門科目があり、本当に強みだと感じます。
片桐:私は岩﨑清隆教授の研究室に所属しています。医療分野に機械工学を応用する、という異分野融合系の研究室で、東京女子医大との共同施設「早稲田大学先端生命医科学センター(TWIns)」で研究を行っています。現在は人間の循環器(主に心臓や血管)をチューブやポンプなどで模擬した流体シミュレーターを作製し、動物実験での再現が難しい心不全などの病態を模擬してさまざまな現象を評価する研究に取り組んでいます。
――最後に、今後の展望について教えてください。
玉山:学外の人にもPatr-Owlを知ってもらいたいので、秋に東京ビッグサイトで開催されるMaker Faire Tokyo 2025 に参加したいと考えています。それまでに、首をかしげる、羽を広げるといった実現しきれなかったフクロウの動きを実装したいです。
個人の展望としては、ひたすら自分のやりたいことに貪欲に取り組み、新しいものを生み出す「自走する作り手」でありたいと思っています。
片桐:学部の3年間はロボコンやものプロに参加するなどロボット製作に集中していましたが、これからは研究分野である医工学の分野を全力で学び、研究に取り組んでいこうと思います。しばらくはロボットの設計とは違ったことをすることになりますが、必ずつながってくると思うので、将来的にはそれまでの知識や経験を融合させて、新しい価値を創生していけたらいいなと思っています。
![]()
大賞受賞後、表彰状を手にチームで記念撮影。左から玉山さん、片桐さん、林さん
第900回
取材・文・撮影:早稲田ウィークリーレポーター(SJC学生スタッフ)
人間科学部 3年 西村 凜花
【プロフィール】
玉山康次郎:埼玉県出身。埼玉県立浦和高等学校卒業。漫画のせりふを覚えるのが好きで、漫画からロボット作りの着想を得ることも多い。お勧めの漫画は『進撃の巨人』諫山創(講談社)、『バガボンド』井上雄彦(講談社)、『Dr.STONE』稲垣理一郎(集英社)。
片桐萌音:東京都出身。東京都立日比谷高等学校卒業。創作全般が好きで、ミニ推理小説を書くことも。最近はミュージック・プログラミング(GEC設置科目)を受講したのがきっかけで、作曲にもチャレンジ中。