ロボットアーム運動生成 旧来比4倍を超える高速計算手法を開発
ロボットアーム運動生成 旧来比4倍を超える高速計算手法を開発
量子インスパイアード技術「デジタルアニーラ」を活用した世界初の取り組み
発表のポイント
ロボットの運動時のエネルギー消費の低減に向けて、効率的な運動軌道を導いたり、その軌道を実現する各時間の加減速への考慮を行ったりするための最適化計算は、これまで運動そのものに比べて膨大な時間を要し、ロボット開発やその進歩にとって大きな障壁となっていました。
組合せ最適化問題を高速に解くことに特化した「デジタルアニーラ」の技術を用いて、ロボットアーム先端の軌道求める最適制御問題として定式化しました。
今回開発した計算手法によって、エネルギー消費の観点で最適な運動生成を達成する高速計算を実現すると同時に約10%のエネルギー消費の低減をもたらすことができました。
早稲田大学(以下、早大)理工学術院総合研究所の大谷拓也(おおたにたくや)次席研究員ならびに同大理工学術院の高西淳夫(たかにしあつお)教授らの研究グループは、富士通株式会社(以下、富士通)との産学連携により、次世代コンピューティングの一つであるアニーリング方式に属する、富士通の量子インスパイアード技術*1「デジタルアニーラ*2」を用いて、ロボットの構造に応じたエネルギー消費の少ない運動を高速で計算する手法を提案しました。量子インスパイアード技術をロボットアームの運動生成に活用する取り組みとしては世界初となります。
本研究成果は世界最大の学術研究団体であり、全世界に40万人を超える会員を有する米国電子電気学会(IEEE)発行の『IEEE access』に2023年9月28日(木)(現地時間)に掲載されました。
【論文情報】
雑誌名:IEEE access
論文名:Energy Efficient Path and Trajectory Optimization of Manipulators with Task Deadline Constraints
DOI:10.1109/ACCESS.2023.3320143
(1)これまでの研究で分かっていたこと(科学史的・歴史的な背景など)
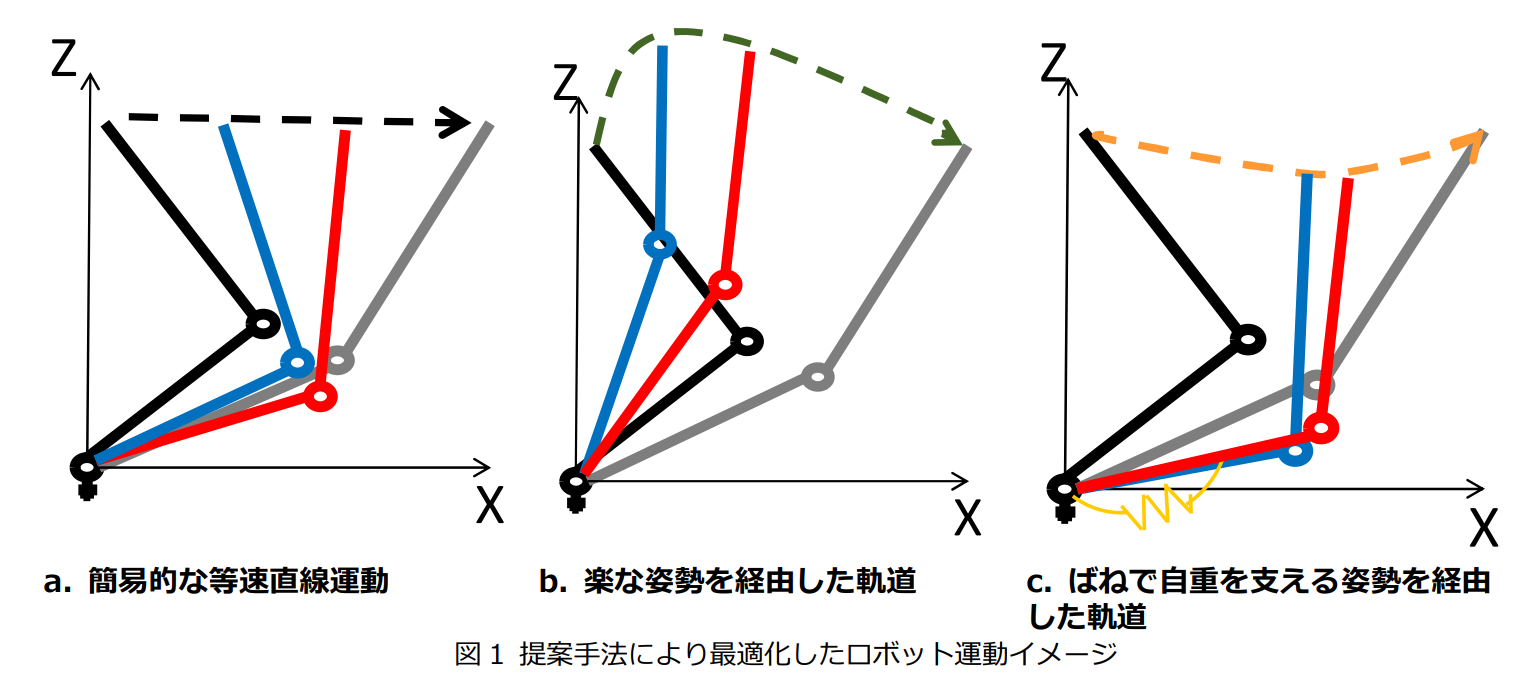
近年、様々な場面でロボットの実用化が進み始めている一方で、エネルギー不足の問題は、ロボット分野のみならず、世界的な問題として深刻化しています。ロボットのエネルギー効率が低いと、エネルギーが無駄に消費されてしまいます。人間は、身体に多くの関節を持ち、手の位置が同じでも様々なポーズで実現することができ、楽な姿勢をすればエネルギー消費は減ります。人間と同じく、ロボットがどのように動くかによってエネルギー消費は変わります。
そのため、ロボットが腕を動かして作業をする際の手の位置が同じであっても、どのように動くかをロボット自身が自動でエネルギー消費の少ない運動を求める計算ができれば、ロボットの運動時のエネルギー消費を低減できます。しかし、腕や足は複数の関節から成ることでその計算が複雑となるため、運動に対して膨大な時間が必要でした。また、ロボットの動く軌道と、その軌道を実現する際の各時間の加減速を同時に考慮することは困難でした。
(2)今回の研究で新たに実現しようとしたこと、明らかになったこと
ロボットのエネルギー消費を低減する方法として、ロボットができる運動範囲の中からエネルギー消費の少ないポーズを考慮できれば、作業時間の一部はエネルギー消費の少ないポーズを経由して動くことができます。また、ロボット内にバネがある場合にはバネがロボットの腕の重さを支えてくれるポーズをとるなど、ロボットの取れる範囲で最適な動作を計画することができると考えました。さらに、ロボットに指示する作業完了時間に余裕がある場合は、作業時間すべてを使ってゆっくり動くよりも、エネルギー消費の少ない楽な姿勢で待機しておき残りの時間で動く運動も、エネルギー消費を低減することには有効です。
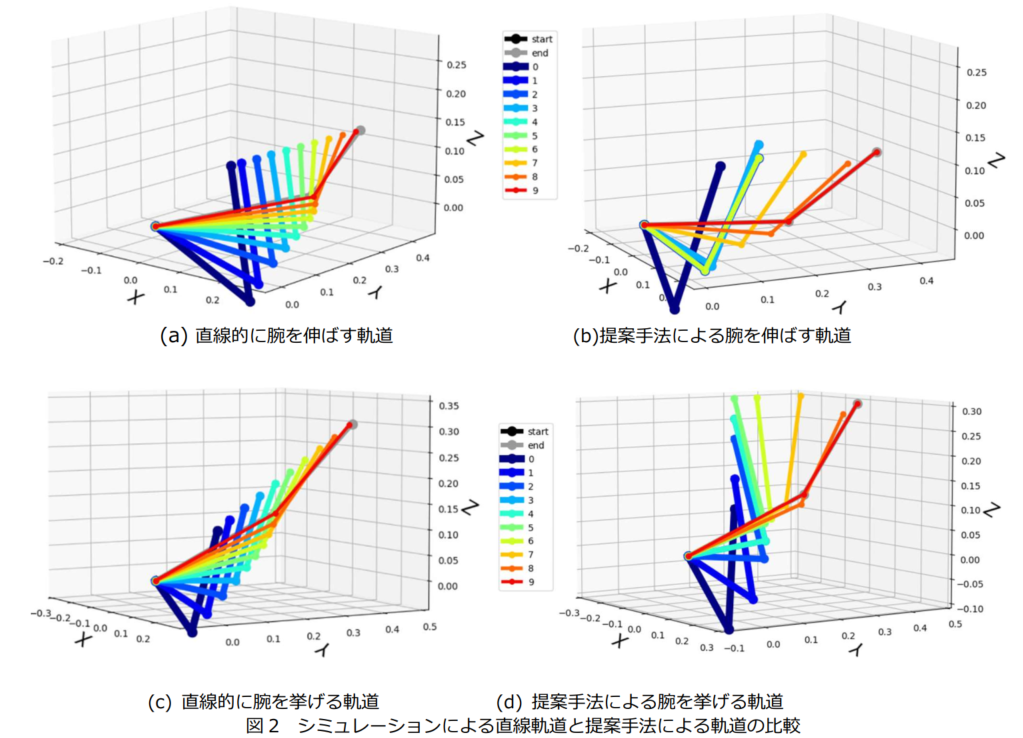
そこで本研究では、次世代コンピューティングの一つであるアニーリング方式に属する富士通株式会社の量子インスパイアード技術「デジタルアニーラ」を用いて、ロボットの構造に応じたエネルギー消費の少ない運動を高速で計算する手法(次項「(4)そのために新しく開発した手法」参照)を提案しました。本手法では、従来の運動生成手法よりもはるかに高速に、ロボットの可動範囲全体を考慮した低エネルギー消費の運動を生成できることがわかりました。一例として、従来はロボットの運動を数式として表現して連続的に計算する手法である内点法*3を用いて440秒かかっていた3秒間のロボット運動生成を、「デジタルアニーラ」による計算100秒で完了できました。旧来比で4倍以上の圧倒的な高速性を示すことができました。また、ロボットアームを前に伸ばす動作や、腕を上げる動作をシミュレーションし、ロボットの各部の重さや長さ、ばねの有無などを考慮してエネルギー消費を計算することで、腕を伸ばす際に短い状態で待機してから伸ばす動作や、腕を上げる際に真上にゆっくり上げてから少し前に出すような動作が生成されました(図2)。さらに、ロボット内にバネがある場合には、ばねが支えられる範囲で腕の重さを支えてもらえる位置に腕を移動した後、目標に到達する運動が生成されました。これらによって、一般的な比較対象として用意した、運動の開始地点から終了地点までの等速直線軌道を通った場合に対して、関節に必要な力の合計が約10%減少でき、エネルギー消費が少なくなりました。
(3)そのために新しく開発した手法
本研究が解くロボットの運動生成問題は、ロボットの運動時のエネルギー消費を最小化する離散化された一連のロボットアームの手の位置を求める最適制御問題として定式化します。本研究で提案する運動計画法は、主に以下の①~⑤からなる5つのステップから構成されます。
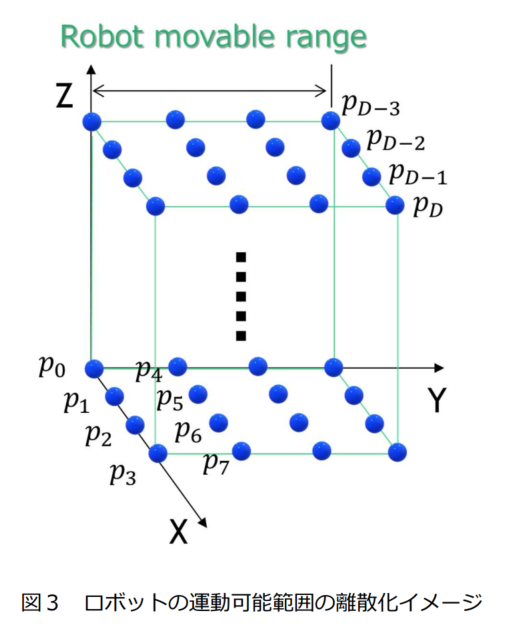
- ロボットの手の可動範囲を離散化する。
- 離散化された手の位置とそれらの組合せにおける各関節角度、角速度、角加速度を計算する。
- 実行する作業に応じて目的関数と制約条件を設定する。
- コスト最小化問題を二次制約なし二値最適化(QUBO)に変換する。
- イジングマシンによる最適化計算を行う。
空間内でのロボットの幅広い動作を単純化するために、ロボットの手の位置を離散化します。従来は、ロボットの運動方程式を構築し連続最適化問題として解く手法が提案されていましたが、ロボットのダイナミクスが複雑であると運動方程式も複雑になり数学的に解くことが難しいことが大きな課題でした。そこで、ロボットの手の位置の時間変化が軌道であるとして連続的な軌道を各瞬間の手の位置の組み合わせと考え、各瞬間にどの手の位置にあるかを組合せ最適化計算によって求めます。ロボットが消費するエネルギーはある時刻に手先位置がどのように変化したかによって計算できるため、離散化した手の位置の中から、手の位置同士の組合せごとに必要なエネルギーを計算し、ロボットのエネルギー消費ライブラリ*4を作成します。このデータから、各時刻の手先位置変化に必要なエネルギーの運動開始から終了までの合計が最小となる手の位置の一連の組み合せを求めます。
本研究では、量子現象に着想を得たデジタル回路設計により複雑な組合せ最適化問題を高速に解くことに特化した技術である、富士通の「デジタルアニーラ」を用いました。これにより、シミュレーテッド・アニーリング*5などの従来の手法よりも高速に組合せ最適化問題を解くことができます。
(4)研究の波及効果や社会的影響
本研究は、ロボットアームを持つ形状のようなロボットであれば汎用的に使用できる技術となっており、論文の中でも複数のロボットアームに対して、それぞれに異なる運動を生成しています。これらによってエネルギー消費を低減できれば、これからロボットが普及していく際にも、ロボットのエネルギー問題を解決することに貢献できると考えます。また、ロボットのエネルギー消費が小さくなれば同じバッテリであっても稼働時間が長くなり、さらには、屋外環境や宇宙など、エネルギー量が限られる空間でのロボットの活躍にも貢献できると期待しています。
(5)今後の課題
現状の課題として、より関節数の多いロボットの運動生成を行うには長い時間を要してしまいます。最適化を行う範囲を段階的に設定して最適化するなどによって、さらに大規模な運動生成を高速に計算する手法が求められます。今後は、ロボットでの様々な運動生成の実証を進めるとともに、ロボットの大きさや重さだけでなく、各部の構造の違いとしてギヤの違いなどをさらに考慮していくことを目指します。
(6)研究者のコメント
最先端の量子インスパイアード技術を用いることで多くのロボットのエネルギー消費低減に貢献できる技術を開発できました。複雑なロボットの運動は既存の計算手法では解くことが難しく、量子コンピューティング技術を用いることでロボット技術もさらに発展すると思うので、これからも研究を進めます。
(7)用語解説
1 量子インスパイアード技術
量子現象に着想を得たコンピューティング技術で、現在の汎用コンピュータでは解くことが難しい「組合せ最適化問題」を高速で解く技術
2 「デジタルアニーラ」
現在の汎用コンピュータでは解くことが困難な組合せ最適化問題を高速に解く富士通独自の量子インスパイアード技術。Fujitsu Computing as a Service Digital Annealer として提供。
3 内点法
連続最適化問題のアルゴリズムであり、特に大規模な問題を高速に解くことができる。
4 エネルギー消費ライブラリ
本研究で用いる、ロボットがあるポーズからあるポーズに短時間で運動するとどの程度のエネルギーを消費するかを、ロボットが実行可能なポーズすべてについて計算しまとめたもの。
5 シミュレーテッド・アニーリング
「焼きなまし法」とも呼ばれ、大域的最適化問題へのアプローチ方法の一つ。金属を熱してから冷ます焼きなましの工程をコンピュータ計算に応用しており、最適化問題を解くために古くから使われている。
(8)論文情報
雑誌名:IEEE access
論文名:Energy Efficient Path and Trajectory Optimization of Manipulators with Task Deadline Constraints
執筆者名(所属機関名):Takuya Otani (Waseda University)、 Makoto Nakamura (Fujitsu Ltd.)、Koichi Kimura (Fujitsu Ltd.)and 、Atsuo Takanishi (Waseda University)
掲載日:2023年9月28日
掲載URL:https://ieeexplore.ieee.org/document/10266335
DOI:10.1109/ACCESS.2023.3320143










 1. How did you find out and choose Waseda?
1. How did you find out and choose Waseda?

 ry different –
ry different –  this might be very exciting to explore but also tiring to adjust. I think it would make it much easier to get to know more about the culture in detail and some basic Japanese. Although Waseda is one of the right places to be, your experience will be different than Japanese students – which is okay. If you focus on yourself, what you want to achieve academically and personally while being here, you will have such a fulfilling unique experience.
this might be very exciting to explore but also tiring to adjust. I think it would make it much easier to get to know more about the culture in detail and some basic Japanese. Although Waseda is one of the right places to be, your experience will be different than Japanese students – which is okay. If you focus on yourself, what you want to achieve academically and personally while being here, you will have such a fulfilling unique experience.